为了更好帮助学校科研团队开展优秀成果的宣传与推介,加速学校科技成果转化运用,中山大学科技园将持续征集并发布学校优秀科技成果。
成果1 高速航行器姿态预测及控制系统
所属领域
新一代信息技术
成果简介
针对目前高速航行器安全性仍难以准确预测和缺乏保障的问题,本成果提出了多套高速航行器的安全监测和控制系统,可实现水面高速船和水上飞机在危险状态下及航行过程中的姿态预测及控制,保障其安全性。相关技术已应用于国家级科研项目,成果已经样机测试验证。
合作需求
技术转让
成果2 营运船舶节能减排装置
所属领域
船舶技术
成果简介
本成果包含多项营运船舶节能减排装置,实验室测试和实际应用表明能有效降低营运船舶排放量、减少2024年碳税法规要求所带来的成本。装置无需特殊配套,符合船检、改造、入级要求,同时可提升船舶在风浪中的安全性。该装置成本较低,应用面广,新建船舶和旧船改造均可采用。

合作需求
技术转让
成果3 新型靶船/双体船
所属领域
船舶技术
成果简介
现有靶船主要利用骨架和简易的浮力单体进行组装,侧重于靶船结构的拓展性和拼装灵活性。但是整个靶船的结构可靠性低,即使具有自航能力,也仅能够模拟低速、直线航行的目标,无法实现高速、机动性和稳定性的航行要求。本项成果的双体靶船通过采用船体甲板、两个浮力单体和至少两个悬架组件的结构形式,利用控制器、传感器检测航行甲板的颠簸程度和侧倾程度动态调整船体相应组件,解决了上述问题,从而可提高靶船的航速、操纵性和稳定性。
合作需求
技术转让
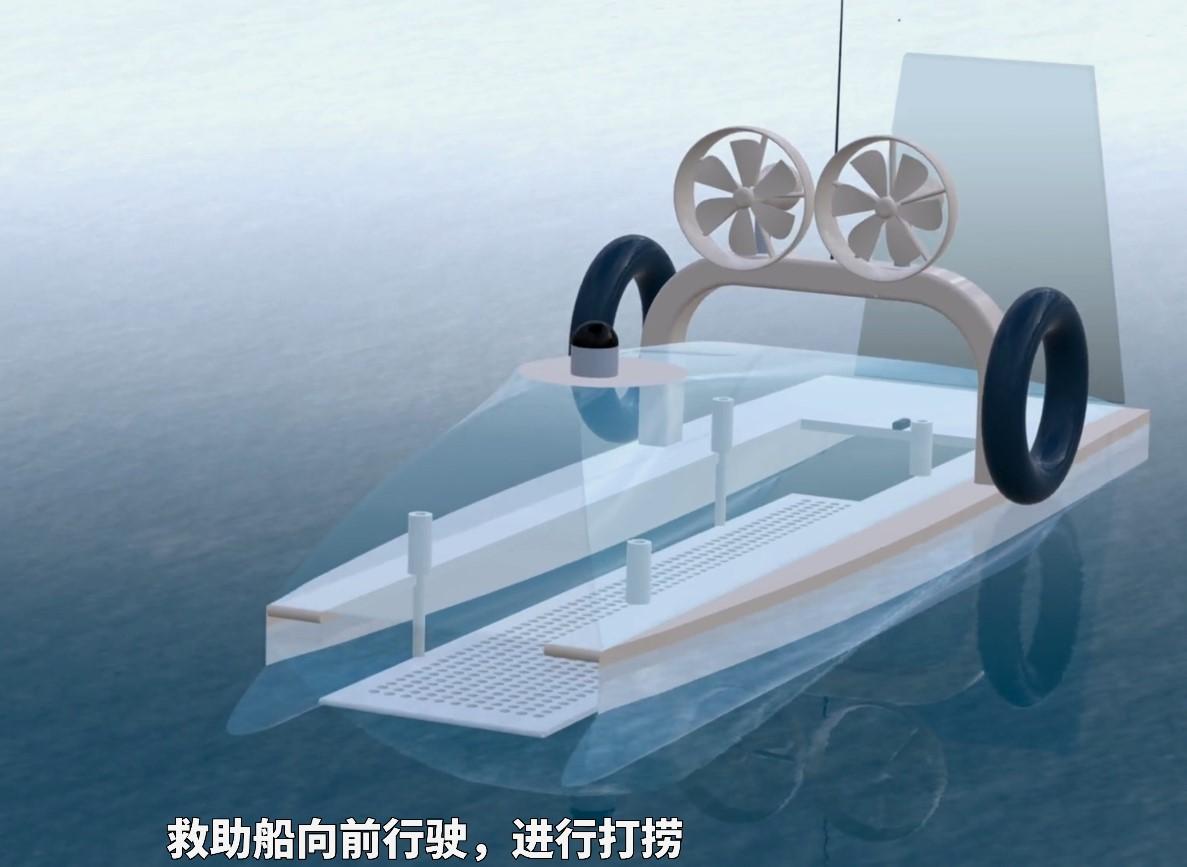
成果4 智能无人搜救船
所属领域
智能装备
成果简介
针对落水人员救助,现有救援设备(如救生圈、吊状设备和各种抛投浮具等)对落水清醒的人员可以实现有效救治,但是对于意识已经模糊和没有行动能力的落水人员,救援效率则大打折扣。同时,无人救助船在救援失去行动能力的人时效率也比较低。本项成果的智能无人搜救船利用双浮体结构,提升船体的整体稳定性,并通过监控组件进行监控,为船体的救援提供路线和侦测,可对无行动能力的人进行有效救助,救助效率高。
合作需求
技术转让
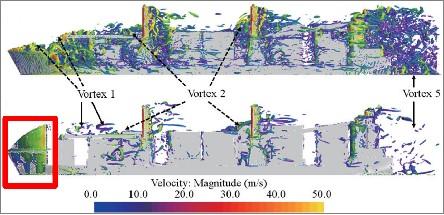
成果5 一种三支点伺服的可变水翼攻角高速船
所属领域
船舶技术
成果简介
现有的高速船由于动力单一且结构的耐波性较差,高速船的推进利用效率低,稳定性不够高,难以对海洋进行远距离和长时间探究,高速船的应用受到极大的空间和时间限制。本项成果利用三支点伺服的稳定几何结构,改善高速船的稳定性和耐波性,使得高速船具有快速性的同时具有良好的耐波性,同时借助水翼攻角传动转盘、水翼、螺旋桨、螺旋桨连杆和防水电机形成三尾三桨结构,可提高船体推进效率。
合作需求
技术转让
如您有成果发布或成果对接意向,欢迎联系
秦杰
020-84112410,13560237601
陈湘鹏
020-84115268,15875072084
 |
 |
 |
| 服务号 | 订阅号 | 微博 |